Build your own X-Bot in Xinchejian If you want to support the X-Bot, buy a couple of them or just help to develop it further then please go to http://dreamore.cn/Project/Show/512 and see more details there.]]>
X-Bot in following mode
January 24th, 2013 § 2 comments § permalink
I'm a brave robot – Workshop @ XinCheJian – 1/20/2013
January 23rd, 2013 § 2 comments § permalink



 ]]>
]]>
RoboRacing – Bragging rights
December 16th, 2012 § 3 comments § permalink
Bragging rights, well deserved, the winner of this years Autonomous racing championship is EdwardRF with his entry XHD, a 10 second car that flew around the track, sticking like glue to the ground, nimble and hightech in one.
5 competitors competed for best time in time trials on the track for 2012, but only one would win. first up on the track was “Icecream Breaker” which unfortunately didn’t make it off the starting track.
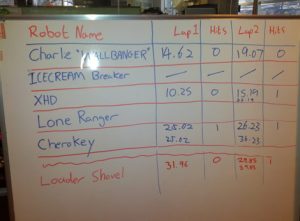
The second contestant was Charlie “wallbanger” famed for it’s uncanny desire to hit every wall in the past, for this year it had an upgrade, 2 Sharp IR range sensors a powerful microservo, a high current motor driver all on top of an arduino nano built right into the original platform, he was no longer a wallbanger but a high powered racing car which clocked in at 7seconds in testing on the same course but different surface. Charlie set the time to beat at 14.62 seconds
XHD time to roll around, with a tough 14.62 seconds to beat, it started out on the track for 1 flawless lap, unfortunately the second lap was not as great, but it did clock in at 10.25seconds. this was the highest tech vehicle to race, PID controllers, wickedly expensive racing platform, 3 Sharp IR range sensors, 1 nano, 1 703n, 1 micro servo, 1 high power motor for the quad wheel drive-shaft with differential driving allowing it to take corners like no ones business.
With a little intermission Cherokey was ready to try again, this 4 wheel drive platform from dfrobot needed a little more time to work out the bugs but it was a great start, it could turn 360° on the spot! equipped with 4 Basic IR sensors, 4 powered wheel drive shaft and a nice base, unfortunately it’s fastest time on the track was 25.02 seconds with 1 collision making it 35.02 seconds.
With man behind the wheel in the only entrant into the User controlled group Stanley clocked in with Loader Shovel with 31.96 seconds, not a good start for human controlled. anyway he won by default.
Lio finally entered in with the Lone Ranger – unfortunately time and a new platform didn’t work out for him, it was a good show of walloping wall-banging!.
in winner takes all, EdwardRF took home the prize of 500rmb 🙂 congratulations to EdwardRF, if you would like to challenge him, make sure you have a 10 second car or you’ll be paying the price of loosing to the champion.
]]>RoboRacing – Final Races for Bragging rights
December 2nd, 2012 § 0 comments § permalink
 我们准备在2012年12月16日下午1点在世界末日前举办本年度最后的新车间机器人比赛。
如果你想要加入这个比赛,请注册我们的活动(你可以参观,但相信我们,加入比赛比作壁上观的感觉会更好!)。加入比赛的需要丢100元人民币到我们的比赛箱,最终胜者将拿走所有的钱,当然如果没有人胜出的话,这些前会用于支持新车间的日常运行。这将是这件乐事的小小刺激吧。
如果你愿意参加循线比赛,虽然没有奖励,但同时也是免费参加噢(如果你愿意,也可以制造一些刺激)。
嗯,下个季度将没有比赛了噢,一起来飞驰吧!
1: 自动组 – entry 100rmb winner takes all
http://wiki.xinchejian.com/wiki/RoboRacing (Challenge track)
2: 循线组 – entry ???rmb winner takes all?
http://wiki.xinchejian.com/wiki/Analog_line_follower
http://139.162.84.35/wp-content/uploads/2012/03/track-201204.pdf << track
注册: http://xinchejian.com/event/?ee=156]]>
我们准备在2012年12月16日下午1点在世界末日前举办本年度最后的新车间机器人比赛。
如果你想要加入这个比赛,请注册我们的活动(你可以参观,但相信我们,加入比赛比作壁上观的感觉会更好!)。加入比赛的需要丢100元人民币到我们的比赛箱,最终胜者将拿走所有的钱,当然如果没有人胜出的话,这些前会用于支持新车间的日常运行。这将是这件乐事的小小刺激吧。
如果你愿意参加循线比赛,虽然没有奖励,但同时也是免费参加噢(如果你愿意,也可以制造一些刺激)。
嗯,下个季度将没有比赛了噢,一起来飞驰吧!
1: 自动组 – entry 100rmb winner takes all
http://wiki.xinchejian.com/wiki/RoboRacing (Challenge track)
2: 循线组 – entry ???rmb winner takes all?
http://wiki.xinchejian.com/wiki/Analog_line_follower
http://139.162.84.35/wp-content/uploads/2012/03/track-201204.pdf << track
注册: http://xinchejian.com/event/?ee=156]]>
Robotics Spectacular at XinCheJian!
October 16th, 2012 § 0 comments § permalink
 周三晚7点至9点新车间将举行机器人专场演示讨论分享会。每个演示时间限制在8到20分钟之间。你拥有自己的机器人但是还没有机会将它展示给大家吗?欢迎来参加这个分享会,你可以在会上进行展示,也可以参见会后讨论!
新车间地址: 上海市徐汇区长乐路1035号2楼 (乌鲁木齐路口)
来自瑞士苏黎世大学实验室的Rolf Pfeifer 教授将介绍他在机器人领域的工作成果 “Roboy”,他的题目是 “Embodied Intelligence”。Rolf Pfeifer 教授是世界领先的研究者,他主要研究设计卓越的智能机器人将如何显著地减少非线性控制的复杂度, 他也是瑞士NCCR (National Competence Center for Research in Robotics ) 组织的副主任。
Ricky Ye (叶琛)博士和来自DFRobot 的Rockets Xia (夏青)将展示他们的一系列商用机器人, 并讲介绍他们是如何用开源代码和开源硬件来做开发的。
Spencer Featherstone 和 Edward Jiang (姜昊) 将介绍新车间Swarm Robots 小组的新进展。我们的Swarm Robots在AFRON大赛中获得二等奖,介于哈佛和麻省理工之间!
Rodolfo “Rudy” Cossovich将展示用Multiplo制做机器人,Multiplo是一种机器人制做系统。Rudy 最近成功在Kickstarter 上为Multiplo地完成了一轮融资!
Announcement by Ricky Ng-Adam (伍思力), translated to Chinese by Amaca Wang, revision by Min Lin Hsieh. Robot drawing by Kevin Chen.]]>
周三晚7点至9点新车间将举行机器人专场演示讨论分享会。每个演示时间限制在8到20分钟之间。你拥有自己的机器人但是还没有机会将它展示给大家吗?欢迎来参加这个分享会,你可以在会上进行展示,也可以参见会后讨论!
新车间地址: 上海市徐汇区长乐路1035号2楼 (乌鲁木齐路口)
来自瑞士苏黎世大学实验室的Rolf Pfeifer 教授将介绍他在机器人领域的工作成果 “Roboy”,他的题目是 “Embodied Intelligence”。Rolf Pfeifer 教授是世界领先的研究者,他主要研究设计卓越的智能机器人将如何显著地减少非线性控制的复杂度, 他也是瑞士NCCR (National Competence Center for Research in Robotics ) 组织的副主任。
Ricky Ye (叶琛)博士和来自DFRobot 的Rockets Xia (夏青)将展示他们的一系列商用机器人, 并讲介绍他们是如何用开源代码和开源硬件来做开发的。
Spencer Featherstone 和 Edward Jiang (姜昊) 将介绍新车间Swarm Robots 小组的新进展。我们的Swarm Robots在AFRON大赛中获得二等奖,介于哈佛和麻省理工之间!
Rodolfo “Rudy” Cossovich将展示用Multiplo制做机器人,Multiplo是一种机器人制做系统。Rudy 最近成功在Kickstarter 上为Multiplo地完成了一轮融资!
Announcement by Ricky Ng-Adam (伍思力), translated to Chinese by Amaca Wang, revision by Min Lin Hsieh. Robot drawing by Kevin Chen.]]>
AFRON $10 robot challenge winners announced at World Maker Faire New York 2012
September 30th, 2012 § 1 comment § permalink
]]>
Swarm Robots Workshop and competition entry
September 17th, 2012 § 3 comments § permalink
 上周六,我们成功地举办了第一场群体智能机器人工坊,有10位成员参与其中:3位10岁左右的小创客,4位美女和3位帅哥。虽然过程中有些小插曲(元件替换和未收到电池),但现在电池和充电器都已经就位了。工坊成员可以在本周三晚上的开放活动,或是周四晚上的群体智能机器人小组聚会,过来领取电池和充电器,也可以发邮件到:[email protected] 另约时间。
另外,新车间的群体智能机器人也已经参与到了世界范围内的教育比赛中,详情可点击这里
上周六,我们成功地举办了第一场群体智能机器人工坊,有10位成员参与其中:3位10岁左右的小创客,4位美女和3位帅哥。虽然过程中有些小插曲(元件替换和未收到电池),但现在电池和充电器都已经就位了。工坊成员可以在本周三晚上的开放活动,或是周四晚上的群体智能机器人小组聚会,过来领取电池和充电器,也可以发邮件到:[email protected] 另约时间。
另外,新车间的群体智能机器人也已经参与到了世界范围内的教育比赛中,详情可点击这里
 ]]>
]]>
Swarm Robots
August 30th, 2012 § 2 comments § permalink
English post is here http://xinchejian.com/2012/08/30/swarm-robots/]]>
Campus Party Berlin
August 25th, 2012 § 0 comments § permalink
Swarm Robots reloaded
August 2nd, 2012 § 0 comments § permalink
]]>