Huodongxing: 上海静安愚园东路28号3号楼一楼 新车间
Alan是frog design的高级顾问。通常他给公司的软件工程和科技策略提供咨询,周末他则将时间花在Unity游戏编程,原型设计以及交互式艺术上。他的游戏编程生涯已经有20年了
What can Unity do?
Unity is used to develop video games for PC, consoles, mobile devices and websites.
Unity3D是由Unity Technologies开发的一个让玩家轻松创建诸如三维视频游戏、建筑可视化、实时三维动画等类型互动内容的多平台的综合型游戏开发工具,是一个全面整合的专业游戏引擎。Unity类似于Director,Blender game engine, Virtools 或 Torque Game Builder等利用交互的图型化开发环境为首要方式的软件。其编辑器运行在Windows 和Mac OS X下,可发布游戏至Windows、Mac、Wii、iPhone、WebGL(需要HTML5)、Windows phone 8和Android平台。也可以利用Unity web player插件发布网页游戏,支持Mac和Windows的网页浏览。它的网页播放器也被Mac widgets所支持。很多游戏设计师,用Unity3D来设计VR游戏。
Workshop Description
在课程的2.5个小时内,我们从零基础开始,学习用Unity编写基于物理原理的简单的游戏。
Workshop structure 工作坊结构
1. Introduction
入门介绍
2. What is Unity and how it compares to other game engines
Unity是什么和其他游戏引擎有什么不同
3. Unity fundamental concepts – Scenes and GameObjects
Unity的基本原理 – 场景和游戏物件
4. Game Physics
游戏物理
5. Your first script
编写脚本
6. Managing Game State
管理游戏场景
7. An overview of more advance Unity concepts (animation, lighting, particles)
其他更先进的Unity知识(动画,光,插件)
This workshop can help you 工作坊能做什么
– 知道怎么用Unity
– 知道怎么写简单的游戏
– 知识在你的游戏编程生涯中的下一步怎么走
In order to attend you should 工作坊准备:
– 至少知道loop(循环)是什么
– 带上笔记本电脑,并将电脑预装unity
– Unity下载地址: https://store.unity.com/download?ref=personal
The class will be taught in English only.
课程将以全英文进行。
Time 时间:
11月12日,周六,14:00 – 16:30
Location 地点:
XinCheJian, East Yuyuan Rd, Number 28, Building 3 (Near to Tongren Rd) / 愚园东路28号3号楼1层 新车间
Fee 费用:
新车间会员:300/人
新车间非会员:350/人
非会员套餐价:400元/人,课程加一个月会员费。]]>
Ivan suspends 100g with YCBO levitation[/caption]
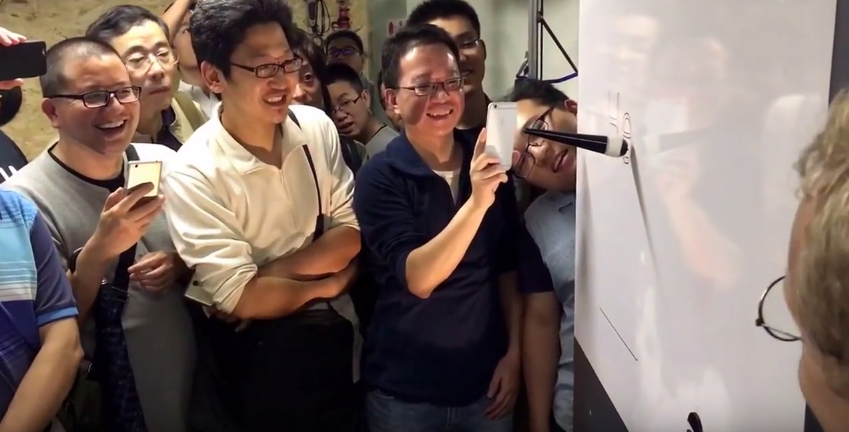
For the past two months, Sean Purser-Haskell and Ivan Tchekashkin have been developing practical demos to showcase superconductor technology. Using YBCO (Yttrium Barium Copper Oxide) cooled by liquid nitrogen to -196 degrees Celsius, they’re able to levitate magnetic materials. They’ve applied this special property to create what they call the “Hover Pen” – a white-board with a marker that writes on its own; and the “Hover Train” – a scale model transit system that suspends superconductor-enabled train cars with a magnetic rail.
[caption id="attachment_8078" align="alignnone" width="454"] From left to right: Maciej Dudek, Danny Kuo, Ivan Tchekashkin, Sean Purser-Haskell[/caption]
At last Wednesday’s open house the team demonstrated the “Hover Pen” to a mesmerized crowd.
Although it’s easy to use YBCO to levitate small magnets in place – a simple physics demonstration – scaling this property is another story. You quickly encounter problems when asked to achieve a certain level of control, or to “levitate heavy things.” The duo have had to rely on more than just past education and work experience; they’ve had to consider plenty of electromagnetic theory and have frequently risked their fingers playing with magnets and liquid nitrogen.
Although they’ve focused most of their time on issues with superconductor technology, they recognize that putting together the whole system required a large base of knowledge – most gained from past projects at Xinchejian. And without the contributions of Maciej Dudek and Danny Kuo, the demos wouldn’t have their clean form or peripheral functions.
Their demos were showcased by a superconductor manufacturer at the China International Industry Fair this past week. Stop by Xinchejian and take a look at the (almost) finished products!]]>
上海静安愚园东路28号3号楼一楼 新车间
About the instructor/老师简介 :
I am Andrew, been in Xinchejian for a couple years now, currently a college student and an entrepreneur. Over the years my experience with electronics have left a couple proud creations, such as laser gun, DIY drone, tesla coils, and etc. A year ago I successfully crowd funded design project Eggie, “The worlds most advanced night light” this has given me ample of experiences in research and design,prototyping, manufacturing, marketing and etc. All of which you are very welcome to ask me.
大家好,我是Andrew。在新车间有几年了,我现在是大学生/创业家。之前的电子背景让我做出很多有意思的东西,我最近在kickstarter上成功的众筹了一个设计产品。所以关于研发,销售,生产都有很多经验。
Workshop description/工作坊介绍:
Most DIY drones suffer the lack of function, looks, and usability. Rendering them to be always considered atoy. This GPS assisted foldable drone allows, the builder to fully experience the joy of flight, with its GPS position hold feature it can stay in air even if you don’t touch the controller. Its aesthetically designed body is made out of carbon fiber composites for light weight and durability. The smart foldable frame of allows the user to take it where ever they want. If you are interested, please join the workshop and experience the joy of creating your own flying drone!
大多数DIY无人机经常受限于其功能性、美观,及可用性使得这些产品总是被看作是一个玩具。GPS定位系统和可折叠机架可以让创客充分体验飞行的乐趣,不用再担心偏移方向或者失控的可能,并且随着GPS定位系统的功能性加入可以使得无人机在空中的悬停可以完全脱离遥控器。机体外部碳纤维材料使得无人机更具美观性,更轻,更坚固及耐用。可折叠机身设计使得创客在携带无人机时更方便。
Workshop structure:
Hour 0: Explainingthe basic principles of the drone, such as its electronic systems, brief thephysics behind how it files. Introduce the parts provided by me, and explain what each component does. 解释基本的无人机规则,电子系统以及电子元器件。
Hour 1: Start ofthe assembly 开始组装
Hour2: Changing the settings and preparing drone for flight 调试无人机
Hour 3: Testflight, and further adjusting 试飞和调试
Requirement:
Over the age of 15, or accompanied by a parent. Bring computer, must bewindows operating system
要带电脑和热情, 低于15岁需要家人陪同. 带电脑。
Price:
Members and first 5 non-member: 3799 rmbfor the complete drone kit and lesson plan
Non-member: 3999rmbfor the complete drone kit and lesson plan
会员和前五名非会员:全套套件和课程3799 人民币
非会员: 全套套件和课程 3999 人民币
Time/时间: 10/22/2016 9:00am
Disclaimer/免责声明:
I am notresponsible for any illegal or misuse of the drone. Please follow allregulation and rules of drones in China. I am also not responsible for anyinjuries that results from the drone, I will however discuss the dangers andwhat to be aware of while starting and flying. This is not a toy!
此工作坊,首先要求在严格的使用方法和组装等必要的模型技术的前提条件下,对出现的任何问题,我们只负责飞机本身,除此之外所造成的其它任何损失和伤害不负责.
Sign up:
Send Email to [email protected] to tell her that you wanna make your own fabulous foldable drone!
报名请发送邮件到[email protected].]]>
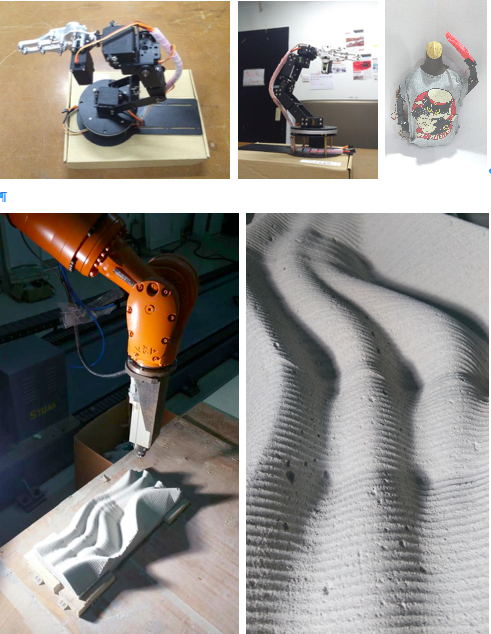
Over a period of six months, architect/researcher Cédric Van Parys travelled to all the different corners of Shanghai, seeking the architectural landmarks that gloriously represent Shanghai’s breakneck progress since the early 1990’s. These urban centerpieces were located on top of the skyscrapers at the gravitational centerpoints of Shanghai’s rapidly expanding and merging districts. Climbing to the top of the numerous surrounding skyscrapers, he recorded (photographed and filmed) the crowns of each of these architectural landmarks.
Working from Xinchejian, he has reproduced the landmarks into a series of associated prototypes. These 3D-printed physical scale models represent a radically different aesthetic perspective on Shanghai’s progress of the last decades.
A first selection of the Monuments for Progress will be on show as part of the exhibition: Grain God’s Narrative at the Swatch Art Peace Hotel on the Bund – one of the city pavilions of the Shanghai Art Biennale.
For more information, please visit: http://monumentsforprogress.altervista.org]]>

 项目来源
该项目来源于新车间会员。当时他还是高中生。在一次班级表演中,他突发奇想,决定做荧光衣增强舞台效果。之后不断改进,成功在大学迎新晚会上推出。如今,他愿意和大家分享该项目
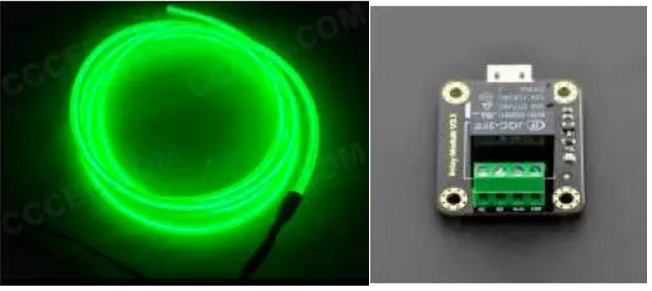
套件:
衣服,裤子,电池,Arduino主控板,热熔枪,EL冷光线5m x 2条,2m x 1条(颜色可选),一套驱动器和电线若干,12V电池盒 x 3(如果不想在驱动器上做修改,可以选择用驱动器自带的8节1.5V干电池的电池盒作为电源则不需要使用这个。但重量大大增加。),继电器 x 1
项目来源
该项目来源于新车间会员。当时他还是高中生。在一次班级表演中,他突发奇想,决定做荧光衣增强舞台效果。之后不断改进,成功在大学迎新晚会上推出。如今,他愿意和大家分享该项目
套件:
衣服,裤子,电池,Arduino主控板,热熔枪,EL冷光线5m x 2条,2m x 1条(颜色可选),一套驱动器和电线若干,12V电池盒 x 3(如果不想在驱动器上做修改,可以选择用驱动器自带的8节1.5V干电池的电池盒作为电源则不需要使用这个。但重量大大增加。),继电器 x 1
 制作方法:
首先当然是将EL冷光线用热熔胶粘到衣服上,先前设计好图案,图案最好能展现出关节、肌肉的轮廓,这样舞蹈会显得美观。多条不同颜色的EL冷光线的切换可以实现变色
制作方法:
首先当然是将EL冷光线用热熔胶粘到衣服上,先前设计好图案,图案最好能展现出关节、肌肉的轮廓,这样舞蹈会显得美观。多条不同颜色的EL冷光线的切换可以实现变色
 然后是将继电器接入到EL冷光线的电路中。一并做在衣服上。继电器的使用方法:http://wiki.dfrobot.com.cn/index.php/(SKU:DFR0017)
衣服做好以后就是对芯片进行编程,让灯光随着音乐的时间闪烁。可以实现人在高空中消失,从空中落下,原地翻转,千手观音,等普通的舞蹈中展现不出的效果。
如图,一个继电器控制着一段灯光,比如继电器1控制的是紫色的灯光,继电器2控制
的是一段蓝色的灯光,继电器三控制的是另外一段蓝色的灯光。这样便可以实现变色,变身
等效果。
以上是一个简单的例子。当然在时间的编写过程中最好能在每一个延时后面标记上这是第几秒,方便之后的修改。第一次写的时候没有经验,都没有留下记号,要修改的时候就十分麻烦,还容易出错,最后不得不重新从头到尾写了一次。
写完时间就是要修改。比如当跳舞的同学跳到半空中时要灭灯,可能一开始灯灭早了或灭晚了,就是要通过不断地修改才能达到很好的效果。
如果只有一个继电器就只需要一个输出端。
价格:
550元/套成品
500元/全套件,包含衣服,裤子,电池,Arduino主控板,热熔枪,EL冷光线5m*2条,2m*1条(颜色可选),一套驱动器和电线若干,12V电池盒*3(如果不想在驱动器上做修改,可以选择用驱动器自带的8节1.5V干电池的电池盒作为电源则不需要使用这个。但重量大大增加。),继电器*1。
410元/半套件,包含电池,Arduino主控板,热熔枪,EL冷光线5m*2条,2m*1条(颜色可选),一套驱动器和电线若干,12V电池盒*3(赠送,如果不想在驱动器上做修改,可以选择用驱动器自带的8节1.5V干电池的电池盒作为电源则不需要使用这个。但重量大大增加。),继电器*1。衣服,裤子自备
然后是将继电器接入到EL冷光线的电路中。一并做在衣服上。继电器的使用方法:http://wiki.dfrobot.com.cn/index.php/(SKU:DFR0017)
衣服做好以后就是对芯片进行编程,让灯光随着音乐的时间闪烁。可以实现人在高空中消失,从空中落下,原地翻转,千手观音,等普通的舞蹈中展现不出的效果。
如图,一个继电器控制着一段灯光,比如继电器1控制的是紫色的灯光,继电器2控制
的是一段蓝色的灯光,继电器三控制的是另外一段蓝色的灯光。这样便可以实现变色,变身
等效果。
以上是一个简单的例子。当然在时间的编写过程中最好能在每一个延时后面标记上这是第几秒,方便之后的修改。第一次写的时候没有经验,都没有留下记号,要修改的时候就十分麻烦,还容易出错,最后不得不重新从头到尾写了一次。
写完时间就是要修改。比如当跳舞的同学跳到半空中时要灭灯,可能一开始灯灭早了或灭晚了,就是要通过不断地修改才能达到很好的效果。
如果只有一个继电器就只需要一个输出端。
价格:
550元/套成品
500元/全套件,包含衣服,裤子,电池,Arduino主控板,热熔枪,EL冷光线5m*2条,2m*1条(颜色可选),一套驱动器和电线若干,12V电池盒*3(如果不想在驱动器上做修改,可以选择用驱动器自带的8节1.5V干电池的电池盒作为电源则不需要使用这个。但重量大大增加。),继电器*1。
410元/半套件,包含电池,Arduino主控板,热熔枪,EL冷光线5m*2条,2m*1条(颜色可选),一套驱动器和电线若干,12V电池盒*3(赠送,如果不想在驱动器上做修改,可以选择用驱动器自带的8节1.5V干电池的电池盒作为电源则不需要使用这个。但重量大大增加。),继电器*1。衣服,裤子自备
 ]]>
]]> From left to right: Maciej Dudek, Danny Kuo, Ivan Tchekashkin, Sean Purser-Haskell[/caption]
From left to right: Maciej Dudek, Danny Kuo, Ivan Tchekashkin, Sean Purser-Haskell[/caption]
 主讲人的联系方式:
如果有任何疑问可以选择以下几种方式与我取得联系
微信:archarry
QQ:514248050
邮箱:
主讲人的联系方式:
如果有任何疑问可以选择以下几种方式与我取得联系
微信:archarry
QQ:514248050
邮箱: About the instructor/老师简介 :
I am Andrew, been in Xinchejian for a couple years now, currently a college student and an entrepreneur. Over the years my experience with electronics have left a couple proud creations, such as laser gun, DIY drone, tesla coils, and etc. A year ago I successfully crowd funded design project Eggie, “The worlds most advanced night light” this has given me ample of experiences in research and design,prototyping, manufacturing, marketing and etc. All of which you are very welcome to ask me.
大家好,我是Andrew。在新车间有几年了,我现在是大学生/创业家。之前的电子背景让我做出很多有意思的东西,我最近在kickstarter上成功的众筹了一个设计产品。所以关于研发,销售,生产都有很多经验。
Workshop description/工作坊介绍:
Most DIY drones suffer the lack of function, looks, and usability. Rendering them to be always considered atoy. This GPS assisted foldable drone allows, the builder to fully experience the joy of flight, with its GPS position hold feature it can stay in air even if you don’t touch the controller. Its aesthetically designed body is made out of carbon fiber composites for light weight and durability. The smart foldable frame of allows the user to take it where ever they want. If you are interested, please join the workshop and experience the joy of creating your own flying drone!
大多数DIY无人机经常受限于其功能性、美观,及可用性使得这些产品总是被看作是一个玩具。GPS定位系统和可折叠机架可以让创客充分体验飞行的乐趣,不用再担心偏移方向或者失控的可能,并且随着GPS定位系统的功能性加入可以使得无人机在空中的悬停可以完全脱离遥控器。机体外部碳纤维材料使得无人机更具美观性,更轻,更坚固及耐用。可折叠机身设计使得创客在携带无人机时更方便。
About the instructor/老师简介 :
I am Andrew, been in Xinchejian for a couple years now, currently a college student and an entrepreneur. Over the years my experience with electronics have left a couple proud creations, such as laser gun, DIY drone, tesla coils, and etc. A year ago I successfully crowd funded design project Eggie, “The worlds most advanced night light” this has given me ample of experiences in research and design,prototyping, manufacturing, marketing and etc. All of which you are very welcome to ask me.
大家好,我是Andrew。在新车间有几年了,我现在是大学生/创业家。之前的电子背景让我做出很多有意思的东西,我最近在kickstarter上成功的众筹了一个设计产品。所以关于研发,销售,生产都有很多经验。
Workshop description/工作坊介绍:
Most DIY drones suffer the lack of function, looks, and usability. Rendering them to be always considered atoy. This GPS assisted foldable drone allows, the builder to fully experience the joy of flight, with its GPS position hold feature it can stay in air even if you don’t touch the controller. Its aesthetically designed body is made out of carbon fiber composites for light weight and durability. The smart foldable frame of allows the user to take it where ever they want. If you are interested, please join the workshop and experience the joy of creating your own flying drone!
大多数DIY无人机经常受限于其功能性、美观,及可用性使得这些产品总是被看作是一个玩具。GPS定位系统和可折叠机架可以让创客充分体验飞行的乐趣,不用再担心偏移方向或者失控的可能,并且随着GPS定位系统的功能性加入可以使得无人机在空中的悬停可以完全脱离遥控器。机体外部碳纤维材料使得无人机更具美观性,更轻,更坚固及耐用。可折叠机身设计使得创客在携带无人机时更方便。
 Workshop structure:
Hour 0: Explainingthe basic principles of the drone, such as its electronic systems, brief thephysics behind how it files. Introduce the parts provided by me, and explain what each component does. 解释基本的无人机规则,电子系统以及电子元器件。
Hour 1: Start ofthe assembly 开始组装
Hour2: Changing the settings and preparing drone for flight 调试无人机
Hour 3: Testflight, and further adjusting 试飞和调试
Requirement:
Over the age of 15, or accompanied by a parent. Bring computer, must bewindows operating system
要带电脑和热情, 低于15岁需要家人陪同. 带电脑。
Price:
Members and first 5 non-member: 3799 rmbfor the complete drone kit and lesson plan
Non-member: 3999rmbfor the complete drone kit and lesson plan
会员和前五名非会员:全套套件和课程3799 人民币
非会员: 全套套件和课程 3999 人民币
Time/时间: 10/22/2016 9:00am
Disclaimer/免责声明:
I am notresponsible for any illegal or misuse of the drone. Please follow allregulation and rules of drones in China. I am also not responsible for anyinjuries that results from the drone, I will however discuss the dangers andwhat to be aware of while starting and flying. This is not a toy!
此工作坊,首先要求在严格的使用方法和组装等必要的模型技术的前提条件下,对出现的任何问题,我们只负责飞机本身,除此之外所造成的其它任何损失和伤害不负责.
Sign up:
Send Email to
Workshop structure:
Hour 0: Explainingthe basic principles of the drone, such as its electronic systems, brief thephysics behind how it files. Introduce the parts provided by me, and explain what each component does. 解释基本的无人机规则,电子系统以及电子元器件。
Hour 1: Start ofthe assembly 开始组装
Hour2: Changing the settings and preparing drone for flight 调试无人机
Hour 3: Testflight, and further adjusting 试飞和调试
Requirement:
Over the age of 15, or accompanied by a parent. Bring computer, must bewindows operating system
要带电脑和热情, 低于15岁需要家人陪同. 带电脑。
Price:
Members and first 5 non-member: 3799 rmbfor the complete drone kit and lesson plan
Non-member: 3999rmbfor the complete drone kit and lesson plan
会员和前五名非会员:全套套件和课程3799 人民币
非会员: 全套套件和课程 3999 人民币
Time/时间: 10/22/2016 9:00am
Disclaimer/免责声明:
I am notresponsible for any illegal or misuse of the drone. Please follow allregulation and rules of drones in China. I am also not responsible for anyinjuries that results from the drone, I will however discuss the dangers andwhat to be aware of while starting and flying. This is not a toy!
此工作坊,首先要求在严格的使用方法和组装等必要的模型技术的前提条件下,对出现的任何问题,我们只负责飞机本身,除此之外所造成的其它任何损失和伤害不负责.
Sign up:
Send Email to